The Segbot (Two Wheel Segway Style Balancing Robot)
The Segbot is part of ongoing inverted pendulum projects in the Control Systems Labs. It uses Microelectromechanical Systems (MEMS) Inertial Measurement Units (IMUs) consisting of accelerometers and rate gyroscopes to determine its angular orientation. Coupled with a TI C2000F28335 Delfino floating-point microcontroller and several other components, these sensors make it possible to stabilize the robot in the balancing position. This robot operates in much the same way as the Segway robots designed for personal transportation. The Segbot is capable of robust, high speed wall following, and can alternatively be controlled remotely using Texas Instruments' eZ430-Chronos Wireless Watch Development Tool. The purpose of this page is to explore and display the capabilities of the Segbot. This page is also intended to exist as an open-source, open-hardware platform to assist in designing, building, and understanding your own Segbot.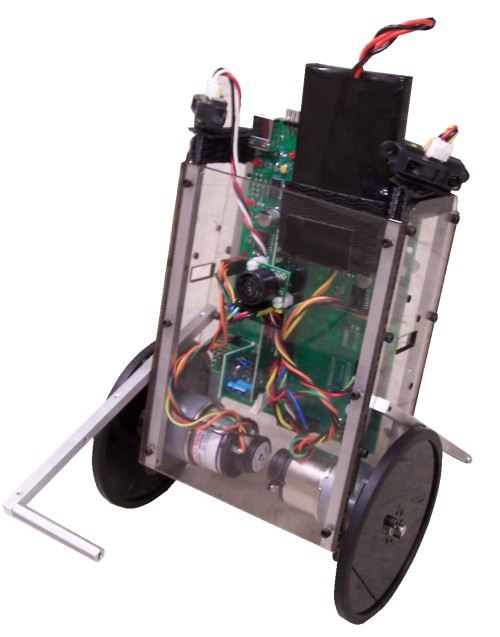
Segbot Navigation
- Home
- Updates
- Videos
- EagleCAD / Board Fabrication
- How to Order Plastic Shell
- Soldering a Segbot Board
- Assembling a Segbot
- XDS100 Programming
- Source Code
- CodeSkin C2Prog
- Bill of Materials
- Contact Information
Updates:
8/5/2011: Source code updated, schematics/gerber files changed to board revision 6, schematics and gerber files added for AeroComm AC4490 PC Interface card, bill of materials updated, tutorials for soldering a Segbot board and assembling a Segbot added, and instructions for using C2Prog with the Segbot added. More Information and Older UpdatesUniversity of Illinois
at Urbana-Champaign
1406 W Green
Urbana, IL 61801-2307